
两倍300.jpg)
两倍300.jpg)











- AgileONE
- H10-W
- FIP
- Diana 7
- Thor 3
- Thor 7
- Thor 7 Pro
- Thor 12
- Thor20
- Tekken D
- VT10-G
- Mobile welding robot
- Zeus 3
- Assessment Training Platform
- Hera
-
AgileONE全尺寸人形机器人作为将物理人工智能带入工业界的类人机器人,Agile ONE 凭借灵巧的双手、先进的感知与直观的交互,不仅能自主、精准、高效地处理工业任务,还能在各工位间自主移动、与人员无缝协作,并在真实工业数据的驱动下持续学习、适应与演进;它更是一个智能互联、能够实时适应、并从每个流程中持续学习的制造系统,能与思灵的其他机器人解决方案无缝协作,共同打造更智能、更具适应性、更高效的工厂。
-
H10-W助理机器人H10-W是面向科研、教育、商业及消费领域的智能机器人,运动机构由轮式底盘与两台7自由度手臂及线性升降躯干组成,支持使用者通过语音指令(如物体取放指令)进行交互,机器人按照使用者的语音指令,执行目标抓取、运送及放置任务。
-
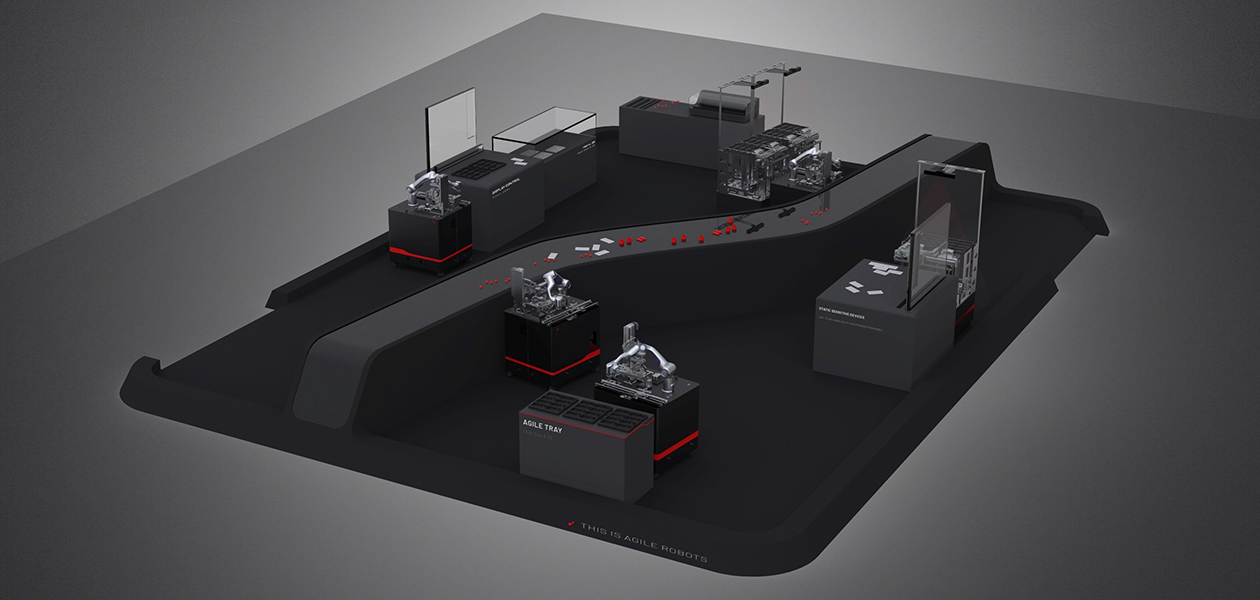
FIP智能柔性机器人操作平台柔性智能平台是由智能机器人操作平台、模块化传送带和智能化供料系统组成,通过可快速更换的模块化末端工具和平台工装,能够快速适应不同机型手机生产线的机器人平台。 柔性智能平台搭配了思灵机器人自主开发的 Agile Core操作系统,可实现新技能加载、任务编程、产线布局修改调整,乃至全智能化生产。 柔性智能平台可大大缩短用户生产线和机器人部署时间,为用户降低集成难度和人力投入成本。
-
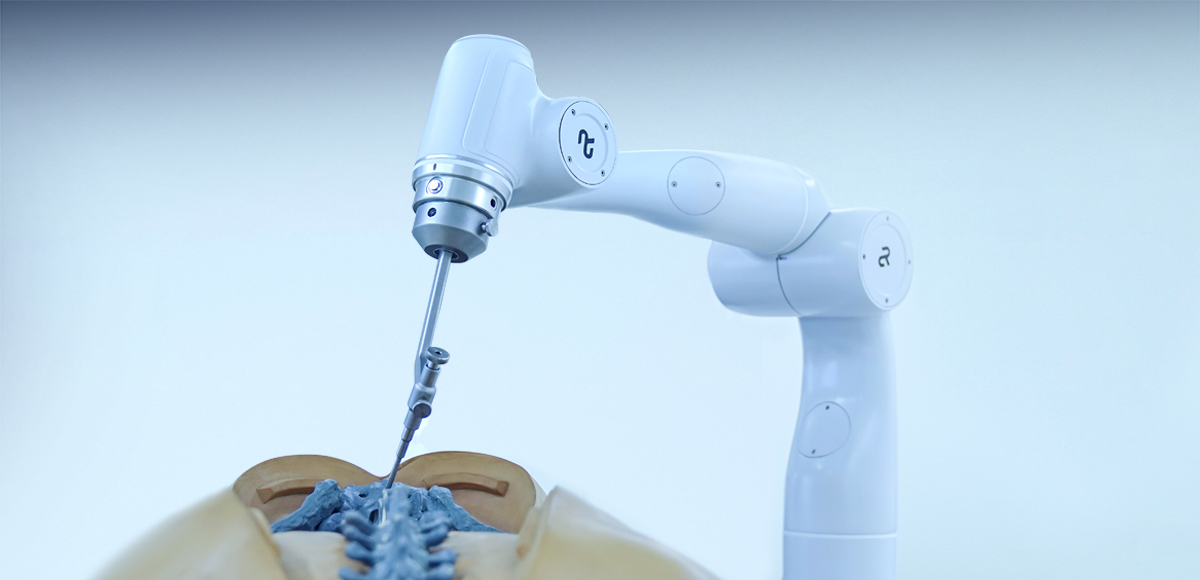
Diana 7智能力控机器人Diana 7 是思灵机器人自主研发的高精度智能力控机器人,关节内置高精度扭矩传感器,具有高灵敏的力控制能力和碰撞检测能力。采用七自由度冗余设计提高了机器人的运动灵活度,零空间控制技术使得机器人能够在有限工作空间中灵活避障,因此可以轻松适应更复杂的应用场景。
-
Thor 3智能机器人Thor3 是思灵机器人自主研发的高精度智能机器人,具备碰撞检测及图形化编程等功能。具有小巧轻便、敏捷到位、易于操作及安装快捷的特点,适合应用在轻型装配和自动化工站等场合,可以轻松实现作业场景的快速部署,并能够与周边设备和环境进行安全的交互。
-
Thor 7高精度智能机器人Thor7是思灵机器人自主研发的高精度智能机器人,具备碰撞检测和图形化编程功能。负载7kg,工作半径可达900mm,具有易于操作、敏捷到位、部署快捷的特点,适用于自动化集成、装配、上下料等场景,且能够与周边设备和环境进行安全的交互。
-
Thor 7 Pro高精度智能力控机器人Thor7 Pro 是思灵机器人自主研发的高精度智能力控机器人,具备碰撞检测、关节力矩控制、拖拽示教及图形化编程等功能,可以实现快速部署并轻松适应多种应用场景。内置高精度关节扭矩传感器可实现高精度力感知及力矩控制,能够使得机器人与周边设备及环境进行实时、安全的交互。
-
Thor 12高精度智能机器人Thor12 是思灵机器人自主研发的高精度智能机器人,具备碰撞检测和图形化编程功能。负载 12 kg,工作半径可达 1300 mm,具有快速作业、易于操作及部署快捷的特点,适用于装配、上下料、搬运码垛等场合,可满足高节拍需求作业,且能够与周边设备和环境进行安全的交互。
-
Thor20高精度智能机器人Thor20 是思灵机器人自主研发的高精度智能机器人,最大负载 20 kg,工作半径最大可达 1700 mm,防护等级IP 54,具有易于操作、部署快捷的特点,具备碰撞检测和图形化编程功能。主要应用于装配、上下料、搬运码垛等场景,满足大负载作业需求。
-
Tekken D电动二指夹爪Tekken D 是一款面向具身智能应用的电动二指夹爪,在传统夹爪的基础抓取功能上,集成了力反馈,支持位置控制与力控两种模式。并且,Tekken D 可在指尖选装视触觉传感器 VT10-G,结合触觉数据执行更灵活和精细的抓取操作。
-
VT10-G视触觉传感器VT10-G是一款通用型视触觉传感器,可灵活适配于各种二指夹爪,包含一个处理盒和两个传感器模块。处理盒具备实时数据处理能力,可同步输出高精度原始RGB图像、动态力场分布图、深度图像及三维点云等多模态信息,为机器人抓取操作提供精准的触觉感知支持。
-
Mobile welding robot移动焊接机器人Agile Robots 焊接机器人系统,结合了自主研发的控制系统与智能视觉技术,实现焊接路径与轨迹的智能集成。 系统通过精准的视觉感知和深度学习,实时优化焊接参数,提升效率与质量。配备智能电弧跟踪、动态避障和多种焊接工艺,确保高精度与稳定性。搭载领先焊接电源和焊枪系统,提供一站式解决方案,快速部署,简便操作。
-
Zeus 3力控电力操作机器人本产品是针对高压配电室场景研发的一款开关柜巡检与操作移动复合机器人,并配套开发专用的智能运维平台。工作人员可在运维软件平台配置、下发巡检与操作任务,并远程监控任务执行情况。机器人全程自主完成智能巡检、倒闸操作、分合闸操作等系列任务,实时将结果上传软件平台进行信息存储、全场景展示、多维分析、预警报警、设备故障诊断,并自动关联生成专用报表报告。
-
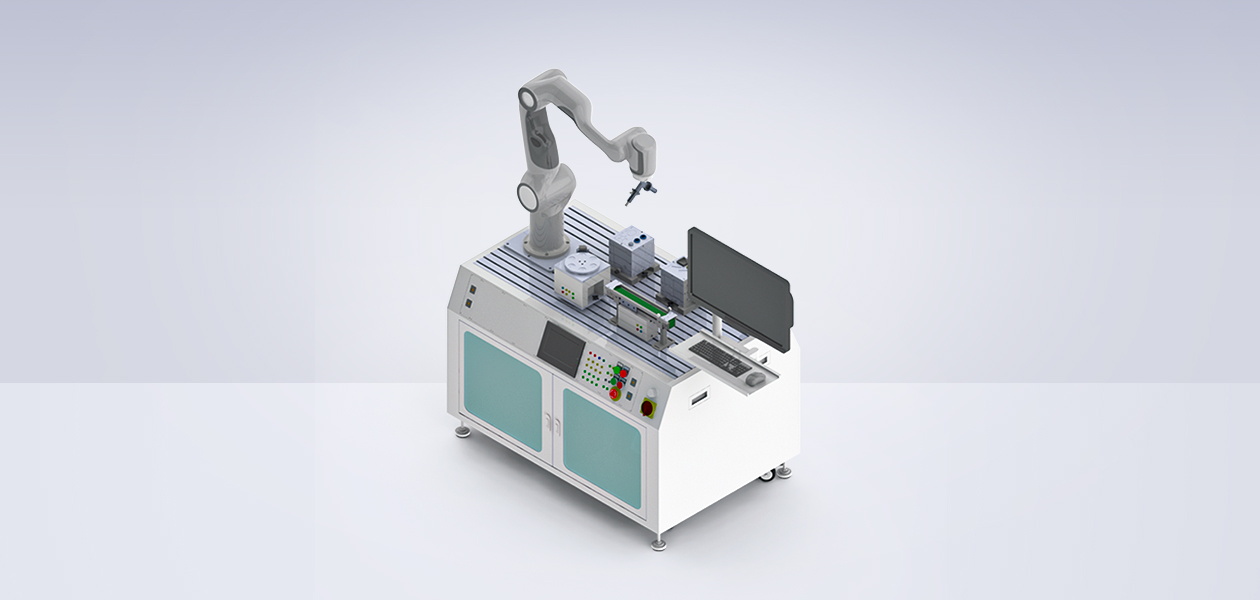
Assessment Training Platform智能机器人技能考核实训台智能机器人技能考核实训平台选用思灵机器人自主研发的 DIANA7 高精度七自由度智能力控机器人,搭配功能实用的机器人实训模块进行教学。平台采用模块化单元设计,结构设计紧凑,涵盖智能机器人基础知识与技能实训内容,满足从入门到综合能力提升的实训要求,适用于智能机器人技能考核和职业技术培训与认证。
-
Hera轨道式智能巡检机器人本品专为配电房、开关室、继保室等电力场景设计的轨道式智能巡检机器人。搭载高精度视觉感知系统与多维传感网络深度赋能变电站无人化运维。通过AI边缘计算引擎,毫秒级精准识别表计读数、开关/刀闸分合状态、屏柜指示灯及硬压板位置;同步智能捕捉设备外观异常:绝缘子破损、呼吸器缺陷、异物附着、渗漏油及金属锈蚀等缺陷。结合深度学习算法与缺陷样本库,实现设备健康状态全维度解析。助力变电站运维迈入“零盲区、全预判”的智慧运维新纪元。
全尺寸人形机器人
AgileONE
作为将物理人工智能带入工业界的类人机器人,Agile ONE 凭借灵巧的双手、先进的感知与直观的交互,不仅能自主、精准、高效地处理工业任务,还能在各工位间自主移动、与人员无缝协作,并在真实工业数据的驱动下持续学习、适应与演进;它更是一个智能互联、能够实时适应、并从每个流程中持续学习的制造系统,能与思灵的其他机器人解决方案无缝协作,共同打造更智能、更具适应性、更高效的工厂。
助理机器人
H10-W
H10-W是面向科研、教育、商业及消费领域的智能机器人,运动机构由轮式底盘与两台7自由度手臂及线性升降躯干组成,支持使用者通过语音指令(如物体取放指令)进行交互,机器人按照使用者的语音指令,执行目标抓取、运送及放置任务。

智能柔性机器人操作平台
FIP
柔性智能平台是由智能机器人操作平台、模块化传送带和智能化供料系统组成,通过可快速更换的模块化末端工具和平台工装,能够快速适应不同机型手机生产线的机器人平台。
柔性智能平台搭配了思灵机器人自主开发的 Agile Core操作系统,可实现新技能加载、任务编程、产线布局修改调整,乃至全智能化生产。
柔性智能平台可大大缩短用户生产线和机器人部署时间,为用户降低集成难度和人力投入成本。
智能力控机器人
Diana 7
Diana 7 是思灵机器人自主研发的高精度智能力控机器人,关节内置高精度扭矩传感器,具有高灵敏的力控制能力和碰撞检测能力。采用七自由度冗余设计提高了机器人的运动灵活度,零空间控制技术使得机器人能够在有限工作空间中灵活避障,因此可以轻松适应更复杂的应用场景。

智能机器人
Thor 3
Thor3 是思灵机器人自主研发的高精度智能机器人,具备碰撞检测及图形化编程等功能。具有小巧轻便、敏捷到位、易于操作及安装快捷的特点,适合应用在轻型装配和自动化工站等场合,可以轻松实现作业场景的快速部署,并能够与周边设备和环境进行安全的交互。

高精度智能机器人
Thor 7
Thor7是思灵机器人自主研发的高精度智能机器人,具备碰撞检测和图形化编程功能。负载7kg,工作半径可达900mm,具有易于操作、敏捷到位、部署快捷的特点,适用于自动化集成、装配、上下料等场景,且能够与周边设备和环境进行安全的交互。

高精度智能力控机器人
Thor 7 Pro
Thor7 Pro 是思灵机器人自主研发的高精度智能力控机器人,具备碰撞检测、关节力矩控制、拖拽示教及图形化编程等功能,可以实现快速部署并轻松适应多种应用场景。内置高精度关节扭矩传感器可实现高精度力感知及力矩控制,能够使得机器人与周边设备及环境进行实时、安全的交互。

高精度智能机器人
Thor 12
Thor12 是思灵机器人自主研发的高精度智能机器人,具备碰撞检测和图形化编程功能。负载 12 kg,工作半径可达 1300 mm,具有快速作业、易于操作及部署快捷的特点,适用于装配、上下料、搬运码垛等场合,可满足高节拍需求作业,且能够与周边设备和环境进行安全的交互。

高精度智能机器人
Thor20
Thor20 是思灵机器人自主研发的高精度智能机器人,最大负载 20 kg,工作半径最大可达 1700 mm,防护等级IP 54,具有易于操作、部署快捷的特点,具备碰撞检测和图形化编程功能。主要应用于装配、上下料、搬运码垛等场景,满足大负载作业需求。

电动二指夹爪
Tekken D
Tekken D 是一款面向具身智能应用的电动二指夹爪,在传统夹爪的基础抓取功能上,集成了力反馈,支持位置控制与力控两种模式。并且,Tekken D 可在指尖选装视触觉传感器 VT10-G,结合触觉数据执行更灵活和精细的抓取操作。

视触觉传感器
VT10-G
VT10-G是一款通用型视触觉传感器,可灵活适配于各种二指夹爪,包含一个处理盒和两个传感器模块。处理盒具备实时数据处理能力,可同步输出高精度原始RGB图像、动态力场分布图、深度图像及三维点云等多模态信息,为机器人抓取操作提供精准的触觉感知支持。

移动焊接机器人
Mobile welding robot
Agile Robots 焊接机器人系统,结合了自主研发的控制系统与智能视觉技术,实现焊接路径与轨迹的智能集成。 系统通过精准的视觉感知和深度学习,实时优化焊接参数,提升效率与质量。配备智能电弧跟踪、动态避障和多种焊接工艺,确保高精度与稳定性。搭载领先焊接电源和焊枪系统,提供一站式解决方案,快速部署,简便操作。

力控电力操作机器人
Zeus 3
本产品是针对高压配电室场景研发的一款开关柜巡检与操作移动复合机器人,并配套开发专用的智能运维平台。工作人员可在运维软件平台配置、下发巡检与操作任务,并远程监控任务执行情况。机器人全程自主完成智能巡检、倒闸操作、分合闸操作等系列任务,实时将结果上传软件平台进行信息存储、全场景展示、多维分析、预警报警、设备故障诊断,并自动关联生成专用报表报告。

智能机器人技能考核实训台
Assessment Training Platform
智能机器人技能考核实训平台选用思灵机器人自主研发的 DIANA7 高精度七自由度智能力控机器人,搭配功能实用的机器人实训模块进行教学。平台采用模块化单元设计,结构设计紧凑,涵盖智能机器人基础知识与技能实训内容,满足从入门到综合能力提升的实训要求,适用于智能机器人技能考核和职业技术培训与认证。
轨道式智能巡检机器人
Hera
本品专为配电房、开关室、继保室等电力场景设计的轨道式智能巡检机器人。搭载高精度视觉感知系统与多维传感网络深度赋能变电站无人化运维。通过AI边缘计算引擎,毫秒级精准识别表计读数、开关/刀闸分合状态、屏柜指示灯及硬压板位置;同步智能捕捉设备外观异常:绝缘子破损、呼吸器缺陷、异物附着、渗漏油及金属锈蚀等缺陷。结合深度学习算法与缺陷样本库,实现设备健康状态全维度解析。助力变电站运维迈入“零盲区、全预判”的智慧运维新纪元。

-
世界领先的力控&力感知技术通过强大的自研AI算法以及自主研发的高分辨扭矩传感器,世界最灵敏的碰撞检测能力成为了现实。思灵机器人致力于突破现有机器人技术的极限,让感知更加灵敏,在刀尖碰到人体皮肤的瞬间,凭借毫秒级的反应时间及强大的算力保证人体的绝对安全。
-
高度智能化的机器人操作系统思灵自研机器人大脑、机器人操作系统(Agile Core)处于世界领先水平,通过算力、AI机器人大脑及操作系统可以不断学习、迭代升级,形成软硬件结合生态系统。 机器人大脑及操作系统重新定义自动化系统配置方式,集成了力控制与视觉控制界面的人性化配置界面,可以同时连接各类软硬件设备,进行快速智能化部署,在数小时内完成新任务的配置工作,极大提高设备稼动率,避免设备闲置和冗长配置过程带来的浪费。
-
自主规划&机器人智能思灵机器人通过自主研发的基于深度及强化学习的AI智能算法,实现毫秒级的视觉辨识速度,并使机器人具备自动规划路径的能力。机器人大脑可以迅速识别海量未知物体目标、自动辨识抓取部位,使人机协作更加便捷、高效、安全。
-
世界级的机器视觉算法让机器人“看见世界”,思灵机器人在视觉感知方面有着深厚积累。自主研发关键技术,如高精度传感器标定、特征提取、匹配和跟踪,基于深度学习的目标检测与实例分割。部署简单可靠,且支持并行加速,可实现精确,稳定,快速的物体定位,测量与空间位姿解算。应用于视觉引导的机器人轨迹生成,轨迹修正,视觉伺服等场景,满足未知与非结构化场景中机器人的操作需求。思灵机器人的视觉技术已在多个应用场景中落地,包括但不限于3C消费电子行业、医学领域、农牧业、轻工制造业。
两倍300.jpg)
两倍300 拷贝 .jpeg)
两倍300 .jpg)
Agile Robots 发布面向工业的全尺寸人形机器人:Agile ONE
Hello World! 思灵机器人(Agile Robots)发布全尺寸人形机器人Agile ONE。

阅读更多
11.24
-
思灵机器人 Agile Robots 完成对蒂森克虏伯自动化工程公司的收购思灵机器人Agile Robots宣布完成对蒂森克虏伯自动化工程公司的收购。此次收购的关键意义,不在于”多了一家公司“,而在于补全了工业自动化关键的工程落地环节-把技术真正变成可落地、可交付、可复制的工厂级能力,将思灵机器人AI能力与Krause Automation超75年工程经验深度融合,构建从机器人硬件、AI软件到整厂集成的一体化自动化方案。04.08
-
思灵机器人 Agile Robots 与谷歌 Google DeepMind 战略合作,加速机器人智能进化2026年3月24日,思灵机器人(Agile Robots)与全球领先的 AI 实验室谷歌(Google DeepMind)正式建立战略研究伙伴关系,共同推动下一代 AI 机器人技术的发展,加速在真实工业场景中的规模化落地。03.25
-
思灵机器人Agile Robots联合创始人赵悦凯:高难度场景落地为机器人泛化到家奠定基础近期,以“向新而立”为主题的2026崇礼论坛在张家口召开。近百位科技与产业嘉宾汇聚雪城,共论智能时代新秩序。在《具身智能的“真问题”与“真用户”》圆桌对话中,思灵机器人(Agile Robots)联合创始人赵悦凯分享了具身智能从概念爆发走向产业扎根的务实思考。02.03
-
思灵机器人Agile Robots创始人陈兆芃:实现物理AI,需要千万、上亿台机器人的广泛应用!具身智能的关键,在于构建从模型到真实世界的完整闭环。01.26







